






본래 공장 중국 스테인리스 CNC 기계로 가공 정밀도 주물 분실된 왁스 주물 투자 주물

우리는 최고가 되기 위해 모든 노력과 노력을 다할 것이며, Original Factory China 스테인레스 스틸 CNC 가공 정밀 주조 로스트 왁스 주조 투자 주조 , 당사의 제품과 솔루션에 관심이 있으시면 빨리 연락해 주시기 바랍니다. 우리는 우리 제품이 당신을 만족시킬 것이라고 굳게 믿습니다.
우리는 최고의 기업이 되기 위해 모든 노력과 노력을 다할 것이며, 대륙간 일류 하이테크 기업의 반열에 오르기 위해 발걸음을 가속화할 것입니다.양면 가공, 면도, 다년간의 업무 경험을 통해 우리는 좋은 품질의 제품과 최고의 사전 판매 및 사후 서비스 제공의 중요성을 깨달았습니다. 공급업체와 고객 사이의 대부분의 문제는 잘못된 의사소통으로 인해 발생합니다. 문화적으로 공급업체는 자신이 이해하지 못하는 사항에 대해 질문하는 것을 꺼릴 수 있습니다. 우리는 이러한 장벽을 허물어 귀하가 원할 때 원하는 수준으로 원하는 것을 얻을 수 있도록 보장합니다. 더 빠른 배송 시간과 원하는 제품이 우리의 기준입니다.
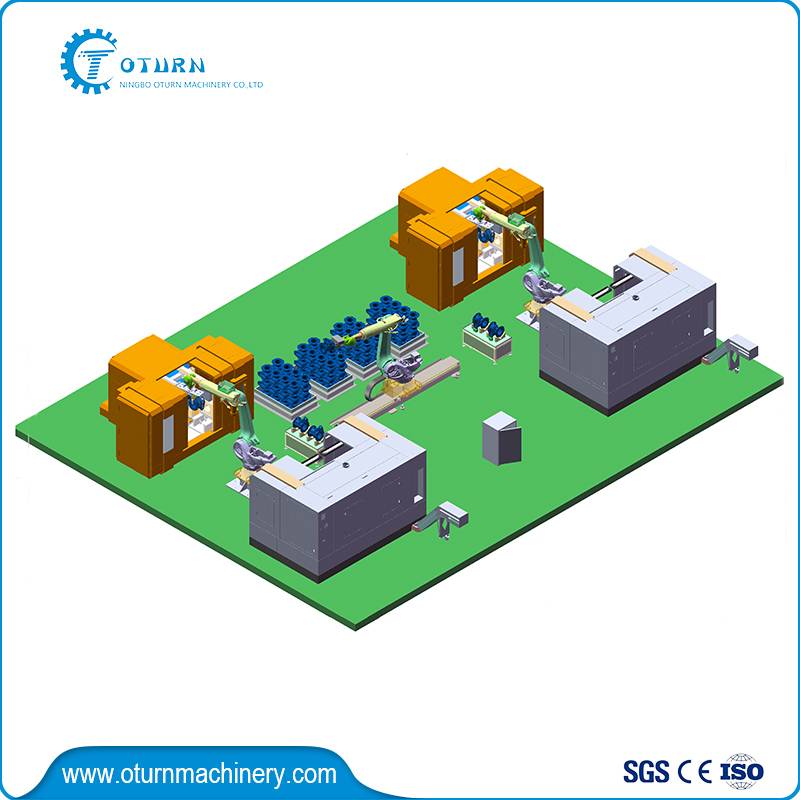
1. 작업자는 밸브 본체 공작물로 가득 찬 팔레트를 로딩 위치 지정 슬롯 1과 로딩 위치 지정 슬롯 2에 배치하고 위치 지정을 위해 빈 트레이를 로딩 위치 지정 슬롯 1과 언로딩 위치 지정 슬롯 2에 놓습니다.
2. 로봇 1의 카메라는 공급 위치 지정 슬롯 1의 팔레트에 있는 공작물을 스캔하여 공작물의 위치를 정확하게 지정하고 공작물 1을 클램핑하여 버퍼 테이블 1의 위치 지정 장치에 배치합니다.
동시에 가공된 공작물 3(로봇 2가 공작 기계 2에서 방금 잡은 작업물)을 잡고 언로딩 위치 지정 슬롯 1로 이동하여 필요에 따라 팔레트에 깔끔하게 배치합니다.
로봇 1의 카메라는 공급 위치 지정 슬롯 2의 팔레트에 있는 공작물을 스캔하여 공작물의 정확한 위치를 지정하고, 공작물 4는 클램핑되어 버퍼 테이블 2의 위치 지정 장치에 배치됩니다.
동시에 가공된 공작물 6(로봇 3이 공작 기계 4에서 방금 잡은 작업물)을 잡고 언로딩 위치 지정 슬롯 2로 이동하여 필요에 따라 팔레트에 깔끔하게 배치합니다.
3. 로봇 2는 버퍼 테이블 1에서 공작물 1을 클램핑하고 공작 기계 1로 달려가 완성 된 공작물 2를 파지하고 공작물 1을 클램핑하고 공작 기계 2로 달려가 완성 된 공작물 3을 파지하고 공작물 2를 클램핑합니다. , 그리고 버퍼 테이블로 실행됩니다. 1. 공작물을 배치합니다. 3. 로봇 2가 사이클을 완료합니다.
4. 로봇(3)은 버퍼링 테이블(2)에서 공작물(4)을 파지하고 공작기계(3)로 달려가 완성된 공작물(5)을 파지하고 공작물(4)을 클램핑하고, 공작기계(4)로 달려가 완성된 공작물(6)을 파지하고 공작물(5)을 클램핑한다. 2. 작업물을 배치합니다. 6. 로봇 3이 사이클을 완료합니다.



 우리는 최고가 되기 위해 모든 노력과 노력을 다할 것이며, Original Factory China 스테인레스 스틸 CNC 가공 정밀 주조 로스트 왁스 주조 투자 주조 , 당사의 제품과 솔루션에 관심이 있으시면 빨리 연락해 주시기 바랍니다. 우리는 우리 제품이 당신을 만족시킬 것이라고 굳게 믿습니다.
우리는 최고가 되기 위해 모든 노력과 노력을 다할 것이며, Original Factory China 스테인레스 스틸 CNC 가공 정밀 주조 로스트 왁스 주조 투자 주조 , 당사의 제품과 솔루션에 관심이 있으시면 빨리 연락해 주시기 바랍니다. 우리는 우리 제품이 당신을 만족시킬 것이라고 굳게 믿습니다.
원래 공장 중국 주조, 강철 주조, 다년간의 업무 경험을 통해 우리는 좋은 품질의 제품과 최고의 사전 판매 및 애프터 서비스 제공의 중요성을 깨달았습니다. 공급업체와 고객 사이의 대부분의 문제는 잘못된 의사소통으로 인해 발생합니다. 문화적으로 공급업체는 자신이 이해하지 못하는 사항에 대해 질문하는 것을 꺼릴 수 있습니다. 우리는 이러한 장벽을 허물어 귀하가 원할 때 원하는 수준으로 원하는 것을 얻을 수 있도록 보장합니다. 더 빠른 배송 시간과 원하는 제품이 우리의 기준입니다.



