BOSM -6025 대향 헤드 보링 밀링 머신
1. 장비사용:
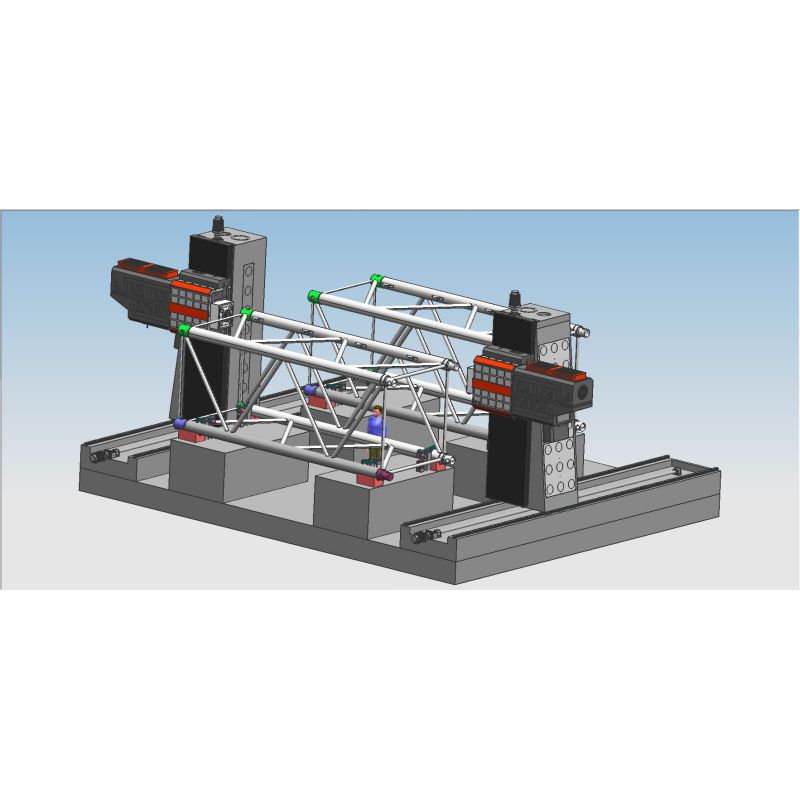
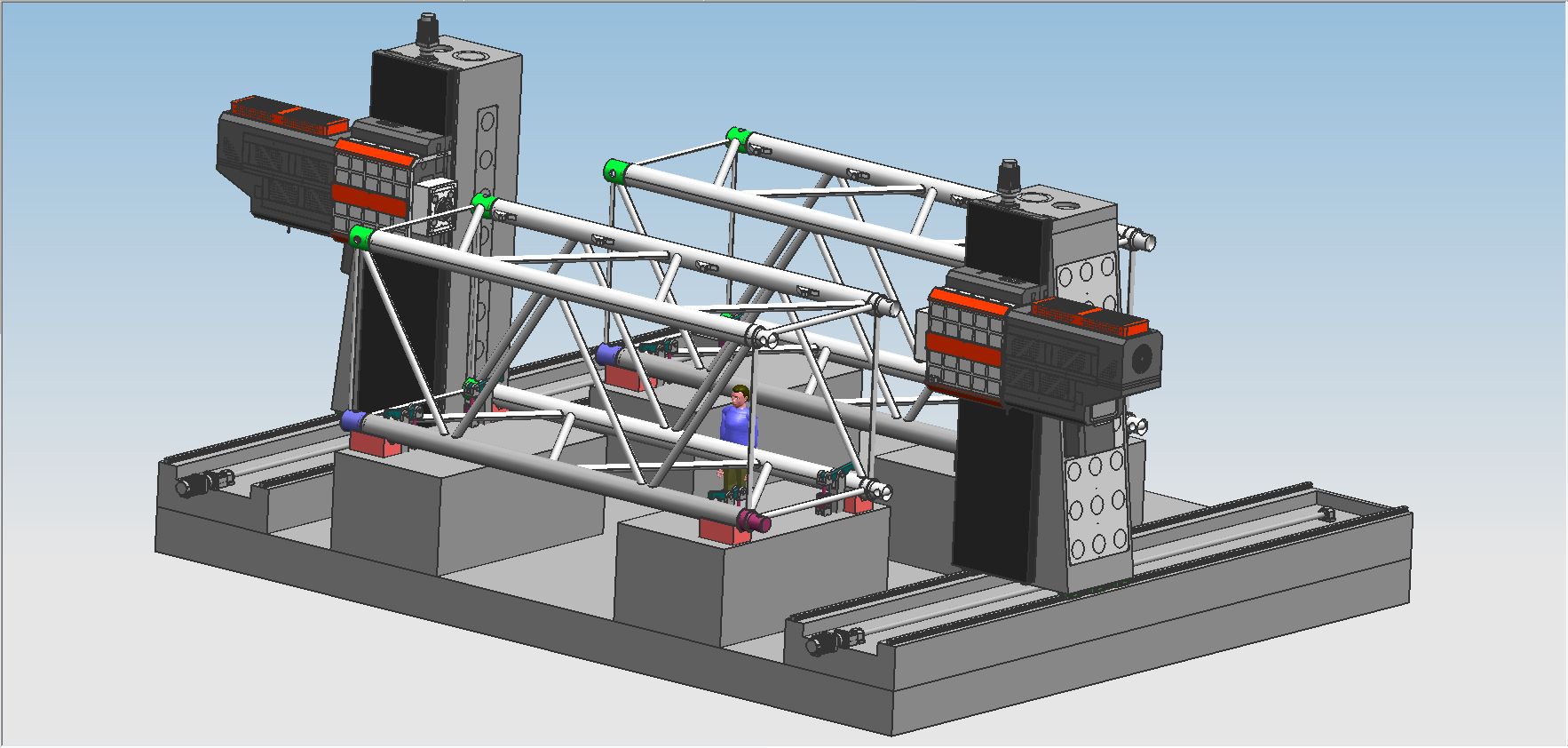
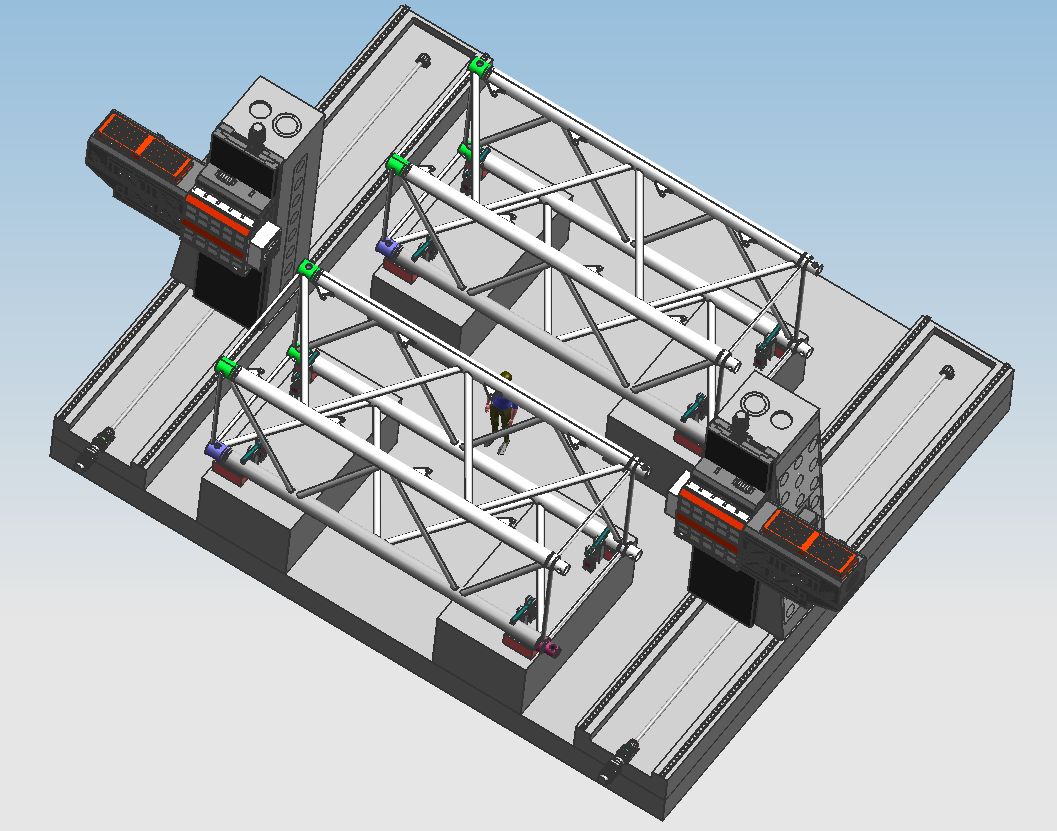
BOSM-6025 더블 스테이션, CNC 수직 컬럼 이동형 더블 컬럼 헤드-투-헤드 보링 및 밀링 머신은 건설 기계의 대칭 공작물을 위한 특수 공작 기계입니다. 공작 기계에는 특수 이동식 컬럼과 두 세트의 수평 램이 장착되어 있어 유효 스트로크 범위 내에서 공작물의 드릴링, 밀링, 보링 및 기타 가공을 실현할 수 있으며 공작물을 한 번에 제자리에서 처리할 수 있습니다(필요 없음). 2차 클램핑용), 빠른 로딩 및 언로딩 속도, 빠른 포지셔닝 속도, 높은 처리 정확도 및 높은 처리 효율성.
2. 장비 구조:
2.1. 공작기계의 주요 부품
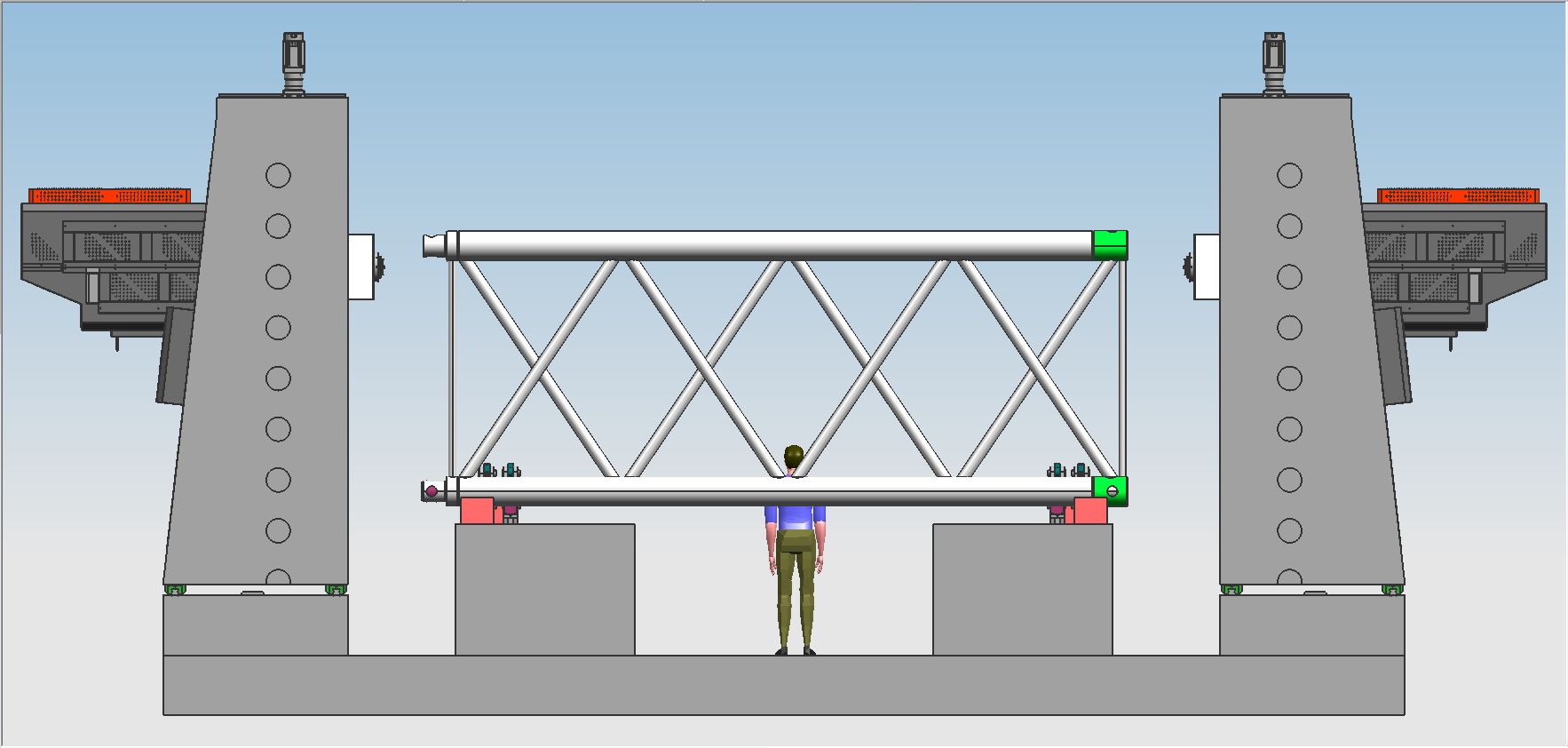
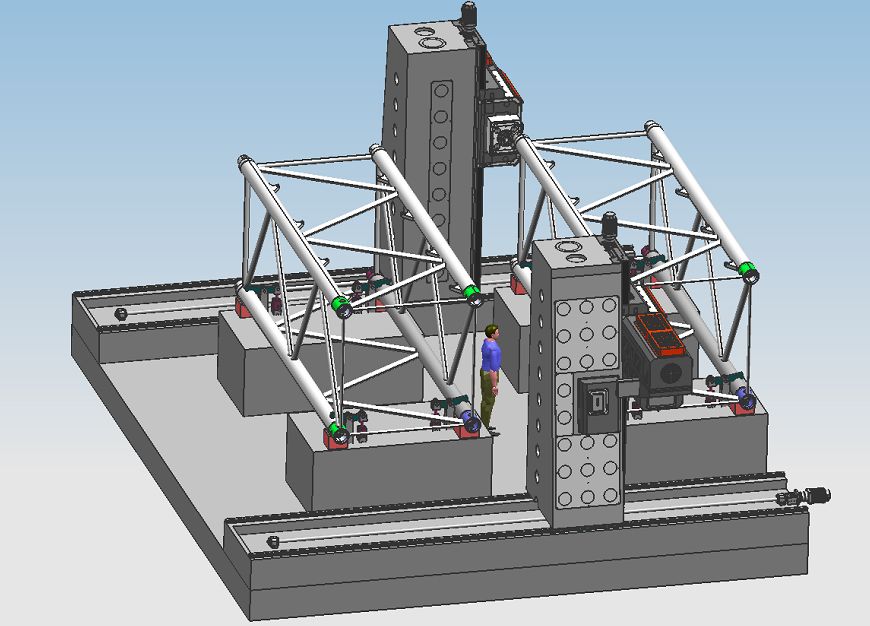
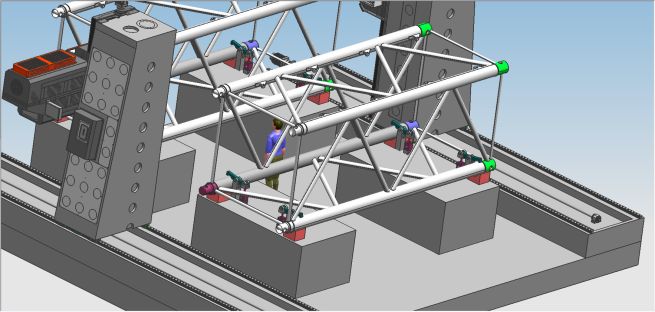
침대, 작업대, 왼쪽 및 오른쪽 기둥, 빔, 안장, 램 및 기타 대형 부품은 모두 수지 모래 성형, 고품질 회주철 250 주조, 뜨거운 모래 구덩이에서 어닐링 → 진동 노화 → 뜨거운로 어닐링 → 진동 노화 → 거친 가공 → 진동 노화 → 열로 어닐링 → 진동 노화 → 마무리로 부품의 부정적인 응력을 완전히 제거하고 부품의 성능을 안정적으로 유지합니다. 공작 기계에는 밀링, 보링, 드릴링, 카운터싱킹, 태핑 등과 같은 기능이 있으며 공구 냉각 방법은 외부 냉각입니다. 공작 기계에는 4축 연결 및 6축 단일 축을 구현할 수 있는 6개의 피드 축이 포함되어 있습니다. 행동. 파워헤드는 2개입니다. 공작기계와 파워헤드의 축방향은 아래 그림과 같습니다.
2. 2축방향 변속기 공급부의 주요 구조
2.2.1 X 1/X2 축: 기둥은 고정 침대의 가이드 레일을 따라 세로로 왕복 운동합니다.
X축 변속기: AC 서보 모터와 고정밀 유성 감속기를 사용하여 볼 스크류 변속기를 통해 두 개의 기둥을 구동하여 X축의 선형 운동을 실현합니다.
가이드 레일 형태: 2개의 고강도 정밀 선형 가이드 레일을 배치합니다.
2.2.2 Y1축 : 컬럼 전면에 파워헤드와 램이 수직으로 설치되어 컬럼의 가이드레일을 따라 좌우로 왕복운동한다.
Y1축 전송: AC 서보 모터는 볼 스크류를 구동하여 안장을 구동하고 Y1축 선형 운동을 실현하는 데 사용됩니다.
가이드 레일 형태: 선형 가이드 레일 4개 + 하드 레일 사각 램 결합.
2.2.3 Y2축 : 파워헤드의 두 번째 램은 기둥 전면에 수직으로 설치되어 기둥의 가이드레일을 따라 좌우로 왕복운동한다.
Y2축 변속기: AC 서보 모터는 볼 스크류를 구동하여 안장을 구동하고 Y2축 직선 운동을 실현하는 데 사용됩니다.
가이드 레일 형태: 선형 가이드 레일 4개 + 하드 레일 사각 램 결합.
2.2.4 Z1 축 : 파워 헤드 슬라이딩 새들은 오른쪽 컬럼 전면에 수직으로 설치되며 컬럼 가이드 레일을 따라 상하로 왕복 이동합니다.
Z1축 변속기: AC 서보 모터와 고정밀 유성 감속기를 사용하여 램을 구동하여 볼 스크류를 통해 이동하여 Z1축 선형 운동을 실현합니다.
가이드 레일 형태: 2개의 선형 가이드 레일.
2.2.5 Z2 축: 파워 헤드 슬라이드 새들은 오른쪽 컬럼 전면에 수직으로 설치되며 컬럼 가이드 레일을 따라 상하로 왕복 이동합니다.
Z1축 변속기: AC 서보 모터와 고정밀 유성 감속기를 사용하여 램을 구동하여 볼 스크류를 통해 이동하여 Z2축 선형 운동을 실현합니다.
가이드 레일 형태: 선형 가이드 레일 2개
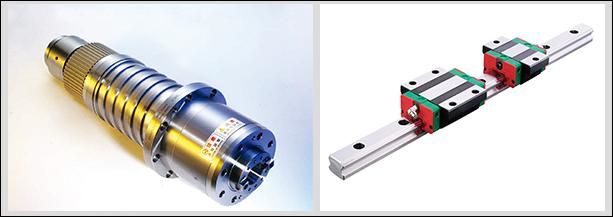
보링 및 밀링 파워 헤드(파워 헤드 1 및 2 포함)는 복합 사각 램이며 이동 방향은 4개의 선형 롤러 가이드 레일에 의해 안내됩니다. 드라이브는 AC 서보 모터를 사용하여 정밀 볼 스크류 쌍을 구동합니다. 기계에는 질소 밸런스 바가 장착되어 있습니다. , 나사와 서보 모터의 기계 헤드 지지력을 줄이십시오. Z축 모터에는 자동 브레이크 기능이 있습니다. 정전이 발생하면 자동 브레이크가 모터 축을 단단히 잡아 회전하지 못하게 합니다. 작업할 때 드릴 비트가 공작물에 닿지 않으면 빠르게 이송됩니다. 드릴 비트가 공작물에 닿으면 자동으로 작업 피드로 전환됩니다. 드릴 비트가 작업물을 관통하면 자동으로 빠른 되감기로 전환됩니다. 드릴 비트의 끝이 작업물을 떠나 설정 위치에 도달하면 자동 순환을 실현하기 위해 다음 구멍 위치로 이동합니다. 또한 막힌 구멍 드릴링, 밀링, 모따기, 칩 브레이킹, 자동 칩 제거 등의 기능을 실현할 수 있어 노동 생산성이 향상됩니다.


500mm 스트로크 복합 사각형 램 파워 헤드는 기존 인서트 대신 선형 가이드를 사용하여 사각형 램의 강성을 유지하면서 가이드 정확도를 크게 향상시킵니다.
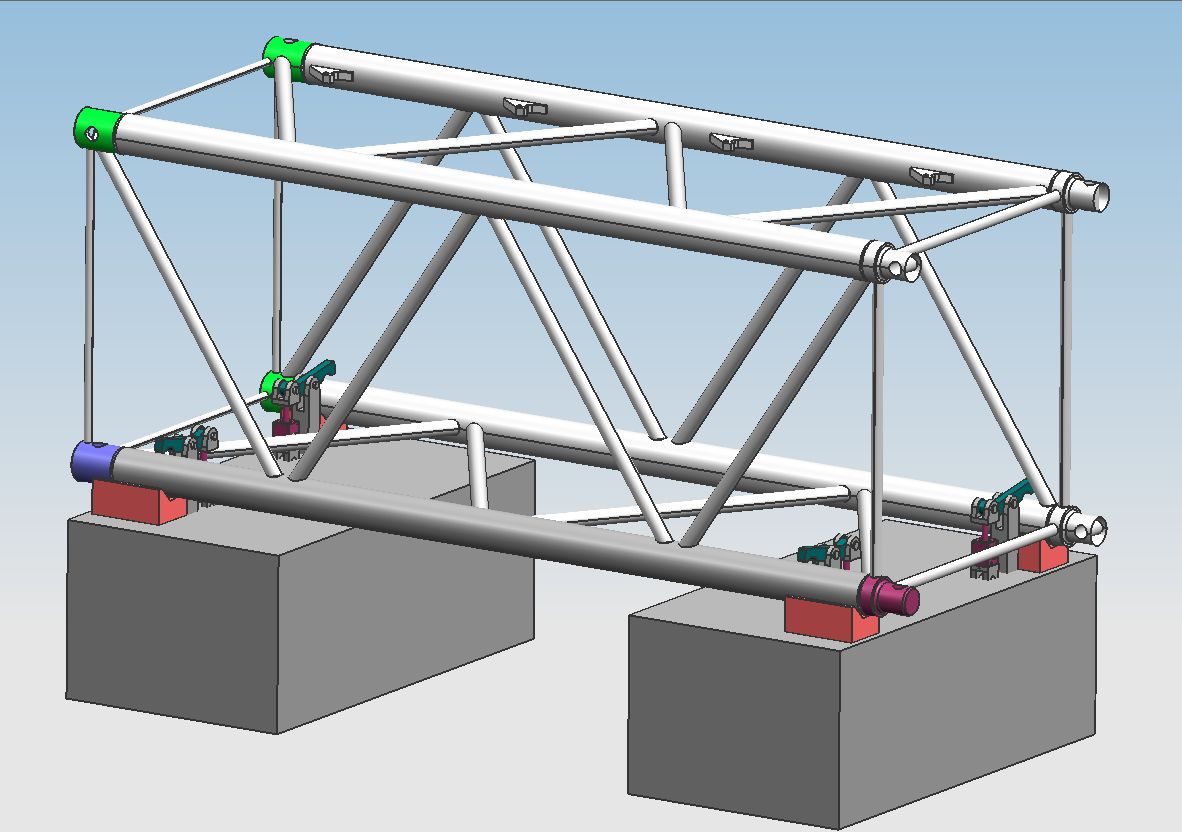
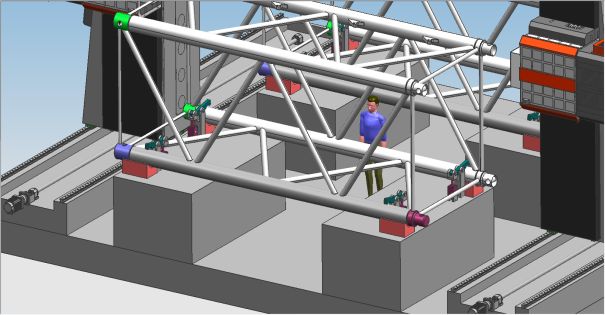
2.3. 공작물 유압 조임 기능
2.4칩 제거 및 냉각
작업대 아래 양측에는 나선형 및 플랫 체인 칩 컨베이어가 설치되어 있으며, 2단의 나선형 플레이트와 체인 플레이트를 통해 칩이 끝부분의 칩 컨베이어로 자동 배출되어 문명화된 생산을 실현할 수 있습니다. 칩 컨베이어의 냉각수 탱크에는 냉각 펌프가 있어 공구의 외부 냉각에 사용하여 공구의 성능과 수명을 보장하고 냉각수를 재활용할 수 있습니다.
3. 완전한 디지털 수치 제어 시스템:
3.1. 칩 브레이킹 기능을 사용하면 칩 브레이킹 시간과 칩 브레이킹 주기를 인간-기계 인터페이스에서 설정할 수 있습니다.
3.2. 공구 리프팅 기능을 사용하면 인간-기계 인터페이스에서 공구 리프팅 거리를 설정할 수 있습니다. 가공이 이 거리에 도달하면 공구가 빠르게 들어 올려지고 칩이 던져진 다음 드릴링 표면으로 빠르게 전달되어 자동으로 작업으로 전환됩니다.
3.3. 중앙 집중식 작동 제어 상자와 휴대용 장치는 수치 제어 시스템을 채택하고 USB 인터페이스와 LCD 액정 디스플레이를 갖추고 있습니다. 프로그래밍, 저장, 표시 및 통신을 용이하게 하기 위해 작동 인터페이스에는 인간-기계 대화, 오류 보상 및 자동 경보와 같은 기능이 있습니다.
3.4. 장비에는 가공 전에 구멍 위치를 미리 보고 재검사하는 기능이 있어 작업이 매우 편리합니다.
4. 자동 윤활
공작 기계 정밀 선형 가이드 레일 쌍, 정밀 볼 스크류 쌍 및 기타 고정밀 모션 쌍에는 자동 윤활 시스템이 장착되어 있습니다. 자동 윤활 펌프는 압력 오일을 출력하고 정량 윤활기 오일 챔버는 오일에 들어갑니다. 오일 챔버에 오일이 채워진 후 시스템 압력이 1.4-1.75Mpa로 상승하면 시스템의 압력 스위치가 닫히고 펌프가 정지하며 언로드 밸브가 동시에 언로드됩니다. 도로의 오일 압력이 0.2Mpa 아래로 떨어지면 정량 윤활기가 윤활 지점을 채우기 시작하고 오일 충전을 완료합니다. 정량 오일 인젝터의 정확한 오일 공급과 시스템 압력 감지로 인해 오일 공급이 안정적이며 각 운동 쌍의 표면에 오일 막이 있는지 확인하여 마찰과 마모를 줄이고 손상을 방지합니다. 과열로 인한 내부 구조는 공작 기계의 정확성과 수명을 보장합니다. 슬라이딩 가이드 레일 쌍과 비교하여 이 공작 기계에 사용되는 롤링 선형 가이드 레일 쌍은 일련의 장점이 있습니다.
① 높은 운동 감도, 롤링 가이드 레일의 마찰 계수는 0.0025-0.01로 작고 구동력이 크게 감소하여 일반 기계의 1에 불과합니다. /10. ② 동마찰과 정지마찰의 차이가 매우 작고 추종성능이 우수하다. 즉, 구동신호와 기계적 작용 사이의 시간 간격이 극히 짧아서 응답속도와 감도 향상에 도움이 된다. 수치 제어 시스템.
③고속 직선 운동에 적합하며 순간 속도는 슬라이딩 가이드 레일보다 약 10배 빠릅니다. ④ 빈틈없는 움직임을 실현하고 기계시스템의 움직임 강성을 향상시킬 수 있습니다. ⑤ 전문 제조업체가 생산하며 정밀도가 높고 다양성이 뛰어나며 유지 관리가 쉽습니다.
5. 축 레이저 검사:
Bosman의 각 기계는 영국 RENISHAW사의 레이저 간섭계로 교정되어 피치 오차, 백래시, 위치 정확도, 반복 위치 정확도 등을 정확하게 검사하고 보상하여 동적, 정적 안정성과 가공 정확도를 보장합니다. 기계 . 볼바 검사 각 기계는 영국 RENISHAW사의 볼바를 사용하여 실제 원 정확도와 기계 기하학적 정확도를 교정하고 동시에 원형 절단 실험을 수행하여 기계의 3D 가공 정확도와 원형 정확도를 보장합니다.


6.공작기계 환경:
6.1. 장비 사용 환경 요구 사항
주변 온도를 일정하게 유지하는 것은 정밀 가공에 있어서 필수적인 요소입니다.
(1) 사용 가능한 주위 온도는 -10 ℃ ~ 35 ℃ 이며, 주위 온도가 20 ℃ 일 때 습도는 40 ~ 75% 이어야 합니다.
(2) 공작기계의 정적 정도를 지정된 범위 내로 유지하기 위해서는 최적 주위 온도가 15°C ~ 25°C가 필요하며 온도차는
±2°C/24h를 초과해서는 안 됩니다.
6.1.2. 전원 전압: 3상, 380V, 전압 변동 ±10% 범위 내, 전원 주파수: 50HZ.
6.1.3. 사용 지역의 전압이 불안정한 경우 공작 기계의 정상적인 작동을 보장하기 위해 공작 기계에 안정화된 전원 공급 장치를 장착해야 합니다.
6.1.4. 공작 기계에는 안정적인 접지가 있어야 합니다. 접지선은 구리선이고, 와이어 직경은 10mm² 이상이어야 하며, 접지 저항은 4Ω 미만이어야 합니다.
6.1.5. 장비의 정상적인 작동 성능을 보장하기 위해 공기 공급원의 압축 공기가 공기 공급원의 요구 사항을 충족할 수 없는 경우 공작 기계에 설치해야 합니다.
공기 앞에 공기원 정화 장치(제습, 탈지, 여과) 세트를 추가합니다.
6.1.6. 공작 기계 생산 실패 또는 공작 기계 정확도 손실을 방지하기 위해 장비를 직사광선, 진동 및 열원, 고주파 발생기, 전기 용접 기계 등에서 멀리 두십시오.
7. 티기술적 매개변수:
| 모델 | 6025-6Z | |
| 가공물 크기 | 길이×너비×높이(mm) | 6000×2300×2300 |
| 갠트리 최대 이송 | 폭(mm) | 6800 |
| 작업용 책상 크기 | 길이×폭(mm) | 3000*1000 =4 |
| 칼럼 여행 | 기둥 앞뒤 이동(mm) | 7000 |
| 더블 램 리프트 위아래로 | 램의 상하 스트로크(mm) | 2500 |
| 스핀들 중심에서 테이블 평면까지의 거리 | 0-2500mm | |
|
수평 램형 드릴 헤드 파워 헤드 하나 둘
| 수량 (2) | 2 |
| 스핀들 테이퍼 | BT50 | |
| 드릴링 직경(mm) | Φ2-Φ60 | |
| 태핑 직경(mm) | M3-M30 | |
| 스핀들 속도(r/min) | 30~5000 | |
| 서보 스핀들 모터 동력(kw) | 37*2 | |
| 두 스핀들 끝 사이의 왼쪽 및 오른쪽 이동 거리 | 5800-6800mm | |
| 램의 좌우 스트로크(mm) | 500 | |
| 양방향 포지셔닝 정확도 | 300mm*300mm | ±0.025 |
| 양방향 반복 위치 정확도 | 300mm*300mm | ±0.02 |
| 공작기계 치수 | 길이×너비×높이(mm) | 도면에 의거 (설계과정에 변경사항이 있을 경우 별도 안내해 드립니다) |
| 총중량(t) | 72T | |